คำแนะนำเกี่ยวกับการใช้ PIC16F877A สำหรับโครงการ Stepper Motor
ไมโครคอนโทรลเลอร์ PIC16F877A ใช้กันอย่างแพร่หลายในโครงการอิเล็กทรอนิกส์หลายโครงการเนื่องจากมีคุณสมบัติที่สมดุลและใช้งานง่ายในคู่มือนี้เราจะดู PIC16F877A อย่างใกล้ชิดครอบคลุมทุกอย่างตั้งแต่รุ่น Pinout และ CAD ไปจนถึงการใช้งานในการควบคุมมอเตอร์สเต็ปไม่ว่าคุณจะสร้างอุปกรณ์ที่เรียบง่ายหรือโครงการระบบอัตโนมัติที่ซับซ้อนการทำความเข้าใจวิธีการเชื่อมต่อและควบคุมมอเตอร์โดยใช้ไมโครคอนโทรลเลอร์นี้จะช่วยให้คุณได้รับผลลัพธ์ที่ดีที่สุด
แคตตาล็อก

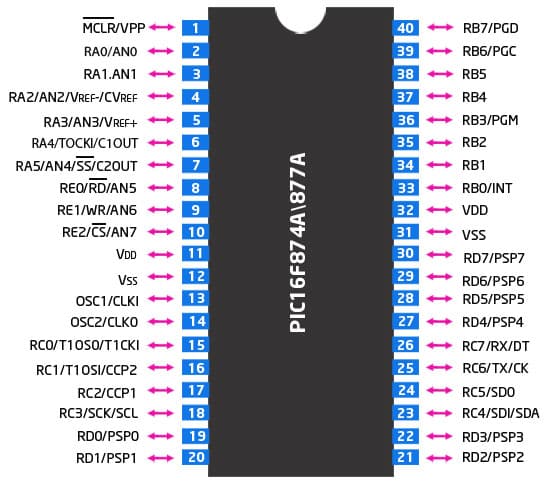
การกำหนดค่า PIC16F877A PIN
รุ่น CAD สำหรับ PIC16F877A
สัญลักษณ์ไดอะแกรม PIC16F877A
PIC16F877A FOETPRINT

รุ่น 3 มิติ
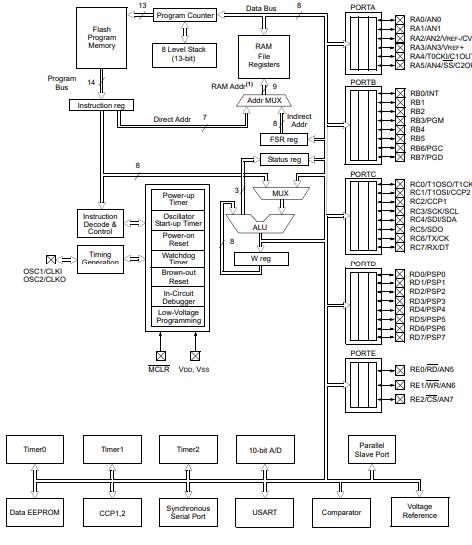
PIC16F877A โครงสร้างภายใน
ข้อกำหนดทางเทคนิคโดยละเอียด
| พิมพ์ | พารามิเตอร์ |
| เวลานำโรงงาน | 7 สัปดาห์ |
| ติดตั้ง | ผ่านรู |
| ประเภทการติดตั้ง | ผ่านรู |
| แพ็คเกจ / เคส | 40-dip (0.600, 15.24mm) |
| จำนวนพิน | 40 |
| ตัวแปลงข้อมูล | A/D 8x10b |
| จำนวน I/OS | 33 |
| ตัวจับเวลาสุนัขเฝ้าบ้าน | ใช่ |
| อุณหภูมิการทำงาน | -40C ~ 85c ta |
| การบรรจุหีบห่อ | หลอด |
| ชุด | รูปถ่าย 16F |
| ที่ตีพิมพ์ | ปี 1997 |
| รหัส JESD-609 | E3 |
| รหัส pbfree | ใช่ |
| สถานะชิ้นส่วน | คล่องแคล่ว |
| ระดับความไวต่อความชื้น (MSL) | 1 (ไม่ จำกัด ) |
| จำนวนการยุติ | 40 |
| รหัส ECCN | หู 99 |
| เทอร์มินัลเสร็จสิ้น | Matte Tin (SN) - อบอ่อน |
| คุณสมบัติเพิ่มเติม | ทำงานที่อุปทานขั้นต่ำ 4V |
| ตำแหน่งเทอร์มินัล | คู่ |
| แรงดันไฟฟ้า | 5V |
| ความถี่ | 20MHz |
| หมายเลขชิ้นส่วนฐาน | pic16f877a |
| จำนวนพิน | 40 |
| จัดหาแรงดันไฟฟ้า-แม็กซ์ (VSUP) | 5.5V |
| แหล่งจ่ายไฟ | 5V |
| จ่ายแรงดันไฟฟ้า-มิน (VSUP) | 4.5V |
| ส่วนต่อประสาน | i2c, spi, ssp, uart, usart |
| ขนาดหน่วยความจำ | 14KB |
| ประเภทออสซิลเลเตอร์ | ภายนอก |
| แหล่งจ่ายไฟเล็กน้อย | 1.6ma |
| ขนาดแรม | 368 x 8 |
| แรงดันไฟฟ้า - อุปทาน (VCC/VDD) | 4V ~ 5.5V |
| ประเภท UPS/UCS/อุปกรณ์ต่อพ่วง ICS | ไมโครคอนโทรลเลอร์, RISC |
| โปรเซสเซอร์หลัก | รูปถ่าย |
| อุปกรณ์ต่อพ่วง | การตรวจจับ/รีเซ็ตสีน้ำตาลออก, POR, PWM, WDT |
| ประเภทหน่วยความจำโปรแกรม | แฟลช |
| ขนาดหลัก | 8 บิต |
| ขนาดหน่วยความจำโปรแกรม | 14KB (8K x 14) |
| การเชื่อมต่อ | I2C, SPI, UART/USART |
| ขนาดบิต | 8 |
| เวลาเข้าถึง | 20 µS |
| มี ADC | ใช่ |
| ช่อง DMA | เลขที่ |
| ความกว้างของบัสข้อมูล | 8B |
| จำนวนตัวจับเวลา/เคาน์เตอร์ | 3 |
| ที่อยู่ความกว้างของรถบัส | 8B |
| ความหนาแน่น | 112 kb |
| ขนาด eeprom | 256 x 8 |
| ครอบครัว CPU | รูปถ่าย |
| จำนวนช่อง ADC | 8 |
| จำนวนช่อง PWM | 2 |
| จำนวนช่อง I2C | 1 |
| ความสูง | 4.06 มม. |
| ความยาว | 52.45 มม. |
| ความกว้าง | 14.22 มม. |
| ไปถึง SVHC | ไม่มี SVHC |
| การชุบแข็งของรังสี | เลขที่ |
| สถานะ ROHS | Rohs3 เป็นไปตามมาตรฐาน |
| นำฟรี | นำฟรี |
ทำความเข้าใจกับ Stepper Motors
มอเตอร์สเต็ปเปอร์เป็นมอเตอร์ไฟฟ้าชนิดหนึ่งที่เคลื่อนที่ในขั้นตอนเฉพาะมากกว่าการเคลื่อนไหวอย่างต่อเนื่องเช่นมอเตอร์แบบดั้งเดิมการเคลื่อนไหวทีละขั้นตอนเหล่านี้วัดในองศาซึ่งอาจแตกต่างกันไปขึ้นอยู่กับแอปพลิเคชัน
Stepper Motors สามารถทำงานในโหมดต่าง ๆ : Wave Drive, Full Drive และ Half Driveแต่ละโหมดควบคุมว่าเฟสมอเตอร์มีพลังอย่างไรส่งผลต่อประสิทธิภาพและทำให้เหมาะสำหรับการใช้งานที่หลากหลาย
ในโหมด Wave Drive มีเพียงเฟสของมอเตอร์เท่านั้นที่ใช้พลังงานในแต่ละครั้งโหมดการควบคุมอย่างง่ายนี้มีประโยชน์สำหรับสถานการณ์ที่ประสิทธิภาพการใช้พลังงานถูกจัดลำดับความสำคัญมากกว่าแรงบิดเช่นในงานระบบอัตโนมัติขั้นพื้นฐานที่ต้องการกระแสเริ่มต้นน้อยที่สุด
โหมดไดรฟ์เต็มพลังสองเฟสพร้อมกันสิ่งนี้ส่งผลให้เกิดแรงบิดที่สูงขึ้นเนื่องจากขดลวดสองตัวทำงานร่วมกันทำให้เหมาะสำหรับการใช้งานที่จำเป็นต้องมีความแม่นยำและความแข็งแรงเช่นในหุ่นยนต์และเครื่องจักร CNC
โหมดไดรฟ์ครึ่งรวมคุณสมบัติของทั้งคลื่นและไดรฟ์เต็มรูปแบบโดยการสลับการใช้พลังงานหนึ่งเฟสและสองเฟสวิธีการนี้ให้ขนาดขั้นตอนที่เล็กลงเพิ่มความละเอียดของมอเตอร์เป็นสองเท่าHalf Drive เหมาะที่สุดสำหรับแอพพลิเคชั่นเช่นการพิมพ์ 3 มิติและเครื่องมือวัดที่ดีซึ่งการเคลื่อนไหวที่ราบรื่นและการวางตำแหน่งที่แม่นยำเป็นสิ่งจำเป็น
เมื่อเลือกมอเตอร์สเต็ปเปอร์สำหรับการใช้งานเฉพาะให้พิจารณาสภาพแวดล้อมการทำงานสำหรับงานที่มีความแม่นยำสูงแนะนำให้ใช้โหมดไดรฟ์ครึ่งเพื่อให้แน่ใจว่าการเปลี่ยนผ่านที่ราบรื่นและการสั่นสะเทือนลดลงสำหรับโครงการที่มุ่งเน้นการประหยัดพลังงานโหมดคลื่นอาจเหมาะสมกว่า
การเลือกโหมดที่เหมาะสมต้องใช้ปัจจัยที่สมดุลเช่นแรงบิดความเร็วและความซับซ้อนของระบบการเลือกโหมดที่ถูกต้องอาจมีผลต่อประสิทธิภาพของมอเตอร์และประสิทธิภาพโดยรวมของระบบของคุณ
การเชื่อมต่อมอเตอร์สเต็ปกับ PIC16F877A
เพื่อเชื่อมต่อมอเตอร์สเต็ปเปอร์กับไฟล์ pic16f877a ไมโครคอนโทรลเลอร์คุณสามารถใช้อาร์เรย์ทรานซิสเตอร์ ULN2003วงจรรวมนี้ออกแบบมาสำหรับมอเตอร์แรงบิดสูงมีเจ็ดคู่ดาร์ลิงตันบิตพอร์ตด์ที่ต่ำกว่าของไมโครคอนโทรลเลอร์เชื่อมโยงกับพินอินพุต (1B, 2B, 3B, 4B) ของ ULN2003 ในขณะที่พินเอาท์พุท (1C, 2C, 3C, 4C) เชื่อมต่อกับพินมอเตอร์ของ Stepperพินทั่วไปของมอเตอร์และหมุด Com ของ ULN2003 เชื่อมต่อกับแหล่งจ่ายไฟ 12V
มอเตอร์สเต็ปเปอร์มักใช้สำหรับแอพพลิเคชั่นที่ต้องการการควบคุมการเคลื่อนไหวที่แม่นยำพวกเขาแปลงพัลส์ดิจิตอลเป็นการหมุนเชิงกลทำให้เหมาะสำหรับอุปกรณ์เช่นเครื่องซีเอ็นซีและเครื่องพิมพ์ 3 มิติซึ่งจะต้องควบคุมตำแหน่งและความเร็วอย่างระมัดระวัง
ULN2003 มีบทบาทสำคัญในการควบคุมมอเตอร์สเต็ปเนื่องจากความสามารถในการจัดการกระแสไฟฟ้าสูงและการเชื่อมต่อที่ง่ายกับไมโครคอนโทรลเลอร์เมื่อเชื่อมต่อกับ PIC16F877A จะใช้บิตพอร์ตด์ที่ต่ำกว่าเพื่อควบคุมมอเตอร์สเต็ปเปอร์การกำหนดค่านี้ให้การควบคุมขั้นตอนที่แม่นยำเพื่อให้มั่นใจว่าการเคลื่อนไหวและการวางตำแหน่งที่แม่นยำ
การใช้ ULN2003 ในการตั้งค่าการควบคุมมอเตอร์มีความน่าเชื่อถือสูงในแอปพลิเคชันในโลกแห่งความเป็นจริงช่วยลดปัญหาเช่นขั้นตอนที่ไม่ได้รับหรือการวางตำแหน่งที่ไม่ถูกต้องปรับปรุงประสิทธิภาพโดยรวมการบำรุงรักษาและการสอบเทียบปกติตามข้อมูลการใช้งานสามารถเพิ่มประสิทธิภาพการทำงานของมอเตอร์ให้เหมาะสมที่สุดเพื่อให้มั่นใจว่ามีความเสถียรในระยะยาวและการทำงานที่แม่นยำ

ปรับความเร็วมอเตอร์สเต็ปเปอร์
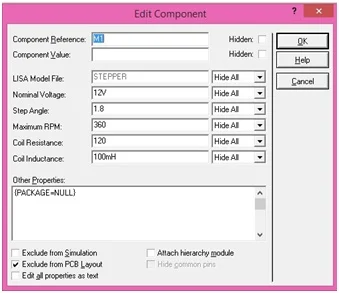
ความเร็วมอเตอร์ Stepper สามารถปรับเปลี่ยนได้อย่างแม่นยำโดยใช้ซอฟต์แวร์จำลอง Proteusโดยการเข้าถึงการตั้งค่าของมอเตอร์ผ่าน 'การแก้ไขคุณสมบัติ' การปรับเปลี่ยนเป็นพารามิเตอร์เช่นจำนวนขั้นตอนและมุมขั้นตอนสามารถทำได้ตัวอย่างเช่นมอเตอร์ 200 ขั้นตอนแยกการหมุนเต็ม (360 °) ออกเป็น 200 ขั้นตอนทำให้แต่ละขั้นตอน 1.8 °การเปลี่ยนการตั้งค่าเหล่านี้ใน Proteus จะสะท้อนแบบไดนามิกในระหว่างการจำลอง
ในทางปฏิบัติมอเตอร์สเต็ปเปอร์มักใช้ในอุตสาหกรรมที่การควบคุมการเคลื่อนไหวที่แม่นยำเป็นสิ่งสำคัญเช่นในเครื่องจักรและหุ่นยนต์ CNCการปรับมุมขั้นตอนและจำนวนขั้นตอนการปรับจูนมอเตอร์เพื่อให้ได้การเคลื่อนไหวที่แน่นอนที่จำเป็นสำหรับงานเฉพาะ
การเปลี่ยนแปลงพารามิเตอร์มอเตอร์สเต็ปเปอร์มีผลต่อลักษณะประสิทธิภาพเช่นแรงบิดและความละเอียดตัวอย่างเช่นการเพิ่มจำนวนขั้นตอนโดยทั่วไปจะช่วยเพิ่มความละเอียด แต่อาจส่งผลกระทบต่อแรงบิดและเวลาตอบสนองการทำความเข้าใจกับการแลกเปลี่ยนเหล่านี้ผ่านการจำลองช่วยในการตัดสินใจอย่างชาญฉลาด
มุมมองที่เหมาะสมยิ่งขึ้นเผยให้เห็นว่าการปรับซ้ำ ๆ ตามด้วยการทดลองเชิงปฏิบัตินำไปสู่การออกแบบเครื่องยนต์ที่แข็งแกร่งยิ่งขึ้นการสร้างความมั่นใจว่าการจำลองแบบดิจิตอลสะท้อนผลลัพธ์ในโลกแห่งความเป็นจริงอย่างใกล้ชิดเป็นสิ่งสำคัญความแตกต่างของการกำหนดค่ามอเตอร์ Stepper นั้นอยู่ในความสมดุลระหว่างความแม่นยำทางทฤษฎีและความเป็นไปได้ในทางปฏิบัติ
การเขียนโปรแกรมมอเตอร์สเต็ปด้วย PIC16F877A
ส่วนนี้ครอบคลุมวิธีการตั้งโปรแกรมมอเตอร์สเต็ปเปอร์โดยใช้ไมโครคอนโทรลเลอร์ PIC16F877A อธิบายโหมดการขับขี่ที่แตกต่างกันและให้คำแนะนำในทางปฏิบัติสำหรับการใช้งานที่มีประสิทธิภาพ
นี่คือรหัสตัวอย่างพื้นฐานเพื่อแสดงการควบคุมมอเตอร์สเต็ปด้วยโหมดไดรฟ์เต็ม:
เป็นโมฆะหลัก ()
-
trisd = 0b00000000;// ตั้งพอร์ตเป็นเอาต์พุต
portd = 0b11111111;// เริ่มต้นพอร์ตด์
ทำ
-
portd = 0b00000011;// เพิ่มพลังสองขั้นตอนพร้อมกัน
delay_ms (500);// การหน่วงเวลา 0.5 วินาที
portd = 0b00000110;
delay_ms (500);
portd = 0b00001100;
delay_ms (500);
portd = 0b00001001;
delay_ms (500);
} ในขณะที่ (1);// ลูปไปเรื่อย ๆ
-
ในรหัสนี้ PORTD ของ PIC16F877A ได้รับการกำหนดค่าเป็นพอร์ตเอาต์พุตเพื่อควบคุมมอเตอร์สเต็ปผ่านไดรเวอร์ ULN2003ลำดับของคำสั่งเพิ่มพลังให้กับมอเตอร์สเต็ปเปอร์สองเฟสในแต่ละครั้งซึ่งเป็นลักษณะของโหมดไดรฟ์เต็มโหมดนี้ถือโรเตอร์ในตำแหน่งคงที่ด้วยแรงบิดสูงสุด แต่โดยทั่วไปจะใช้พลังงานมากขึ้น
โหมดไดรฟ์เต็มไม่ใช่วิธีเดียวในการควบคุมมอเตอร์สเต็ปโหมด Wave Drive และ Half Drive ให้ทางเลือกตามข้อกำหนดเฉพาะไดรฟ์คลื่นพลังงานเพียงครั้งเดียวในแต่ละครั้งซึ่งจะช่วยลดการใช้พลังงาน แต่ส่งผลให้แรงบิดลดลงไดรฟ์ครึ่งทางเลือกระหว่างหนึ่งและสองขั้นตอนให้ความละเอียดสูงขึ้นและการเคลื่อนไหวที่ราบรื่นขึ้น
เมื่อการเขียนโปรแกรม Stepper Motors เลือกโหมดการขับขี่ที่เหมาะกับความต้องการของคุณมากที่สุดไม่ว่าจะเป็นการวางตำแหน่งที่แม่นยำประสิทธิภาพพลังงานหรือแรงบิดสูงสุด
การใช้งานจริงของ Stepper Motors
มอเตอร์สเต็ปเปอร์มีการใช้กันอย่างแพร่หลายในหลายอุตสาหกรรมเนื่องจากความสามารถในการควบคุมและประสิทธิภาพที่เชื่อถือได้อย่างแม่นยำความเก่งกาจของพวกเขาทำให้พวกเขาเหมาะสำหรับทุกสิ่งตั้งแต่รถยนต์และเครื่องใช้ในครัวเรือนไปจนถึงเครื่องจักรอุตสาหกรรมและอุปกรณ์การแพทย์
ในโลกยานยนต์ Stepper Motors มีบทบาทสำคัญในการควบคุมระบบเช่นคันเร่งไฟหน้าและเครื่องปรับอากาศพวกเขาช่วยปรับแต่งส่วนประกอบเหล่านี้อย่างละเอียดเพื่อให้แน่ใจว่ายานพาหนะทำงานได้อย่างราบรื่นและมีประสิทธิภาพในขณะเดียวกันในอุปกรณ์สำนักงานเช่นเครื่องพิมพ์และเครื่องถ่ายเอกสาร Stepper Motors จัดการงานเช่นการให้อาหารกระดาษและการจัดวางหมึกความแม่นยำนี้ทำให้มั่นใจได้ว่าคุณภาพการพิมพ์ที่สอดคล้องกันและการทำงานที่ราบรื่นเมื่อเวลาผ่านไป
ที่บ้านเครื่องใช้ไฟฟ้าเช่นเครื่องซักผ้าและเครื่องล้างจานพึ่งพามอเตอร์สเต็ปเปอร์เพื่อควบคุมการไหลของน้ำและการหมุนกลองเพื่อให้มั่นใจว่าทุกอย่างทำงานได้อย่างราบรื่นในการตั้งค่าอุตสาหกรรมมอเตอร์สเต็ปเป็นสิ่งสำคัญสำหรับการใช้งานเครื่องซีเอ็นซีและแขนหุ่นยนต์ซึ่งพวกเขาให้การเคลื่อนไหวที่แน่นอนที่จำเป็นสำหรับการผลิตที่มีความแม่นยำสูง
ระบบรักษาความปลอดภัยยังได้รับประโยชน์จากการเคลื่อนที่ที่เชื่อถือได้ของมอเตอร์สเต็ปเปอร์ในอุปกรณ์เช่นกล้องวงจรปิดและล็อคอัตโนมัติมอเตอร์สเต็ปเปอร์ช่วยให้การวางตำแหน่งที่ราบรื่นและแม่นยำซึ่งเป็นสิ่งจำเป็นสำหรับการตรวจสอบและรักษาความปลอดภัยที่มีประสิทธิภาพในการดูแลสุขภาพมอเตอร์สเต็ปเปอร์ใช้ในอุปกรณ์การแพทย์เช่นปั๊มแช่และอุปกรณ์ถ่ายภาพซึ่งพวกเขาให้การควบคุมที่แม่นยำที่จำเป็นสำหรับการทำงานที่ปลอดภัยและแม่นยำ
ในขณะที่เทคโนโลยียังคงพัฒนาอย่างต่อเนื่องคาดว่า Stepper Motors จะพบแอพพลิเคชั่นมากขึ้นในสาขาที่เกิดขึ้นใหม่เช่นหุ่นยนต์และยานพาหนะอิสระการพัฒนาอย่างต่อเนื่องของพวกเขามีแนวโน้มที่จะนำไปสู่ความแม่นยำและประสิทธิภาพที่มากขึ้นการขยายบทบาทของพวกเขาในอุตสาหกรรมต่าง ๆ
ชิ้นส่วนไมโครคอนโทรลเลอร์เทียบเคียงได้
| หมายเลขชิ้นส่วน | PIC16F877A-I/P | PIC16F77-I/P | PIC16F74-I/P | PIC16F777-I/P |
| ผู้ผลิต | เทคโนโลยีไมโครชิป | เทคโนโลยีไมโครชิป | เทคโนโลยีไมโครชิป | เทคโนโลยีไมโครชิป |
| แพ็คเกจ / เคส | 40-dip (0.600, 15.24mm) | 40-dip (0.600, 15.24mm) | 40-dip (0.600, 15.24mm) | 40-dip (0.600, 15.24mm) |
| จำนวนพิน | 40 | 40 | 40 | 40 |
| ความกว้างของบัสข้อมูล | 8 B | 8 B | 8 B | 8 B |
| จำนวน I/O | 33 | 33 | 33 | 36 |
| ส่วนต่อประสาน | i2c, spi, ssp, uart, usart | i2c, spi, ssp, uart, usart | i2c, spi, ssp, uart, usart | i2c, spi, uart, usart |
| ขนาดหน่วยความจำ | 14 kb | 7 kb | 14 kb | 14 kb |
| แรงดันไฟฟ้า | 5 V | 5 V | 5 V | 5 V |
| อุปกรณ์ต่อพ่วง | การตรวจจับ/รีเซ็ตสีน้ำตาลออก, POR, PWM, WDT | การตรวจจับ/รีเซ็ตสีน้ำตาลออก, POR, PWM, WDT | การตรวจจับ/รีเซ็ตสีน้ำตาลออก, POR, PWM, WDT | การตรวจจับ/รีเซ็ตสีน้ำตาลออก, POR, PWM, WDT |
| ดูเปรียบเทียบ | PIC16F877A-I/P VS PIC16F77-I/P | PIC16F877A-I/P VS PIC16F77-I/P | PIC16F877A-I/P VS PIC16F74-I/P | PIC16F877A-I/P VS PIC16F777-I/P |
คำถามที่พบบ่อย [คำถามที่พบบ่อย]
1. มอเตอร์สเต็ปเปอร์ใช้อะไรเพื่อสร้างการเคลื่อนไหวเชิงกล?
มอเตอร์สเต็ปเปอร์สร้างการเคลื่อนไหวเชิงกลโดยใช้พัลส์ไฟฟ้า
2. มอเตอร์สเต็ปเปอร์ทำอะไร?
มอเตอร์สเต็ปเปอร์เคลื่อนที่ในขั้นตอนที่ไม่ต่อเนื่อง
3. การวัดสเต็ปเปอร์มอเตอร์อย่างไร?
มอเตอร์สเต็ปเปอร์วัดในองศา
4. มอเตอร์สเต็ปเปอร์ใช้กี่ขั้นตอน?
มอเตอร์ Stepper เคลื่อนที่ทีละขั้นตอน
5. สเต็ปเปอร์มอเตอร์มีโหมดการกระตุ้นกี่โหมด?
มอเตอร์สเต็ปเปอร์มีโหมดการกระตุ้นสามโหมด
6. วิธีที่ง่ายที่สุดในการเชื่อมต่อมอเตอร์สเต็ปเปอร์คืออะไร?
วิธีที่ง่ายที่สุดคือการเชื่อมต่อกับไมโครคอนโทรลเลอร์ PIC16F877A
7. อินพุตพินของ ULN2003 กี่ตัวเชื่อมต่อกับบิตที่สำคัญที่สุดของ portd ของไมโครคอนโทรลเลอร์
หมุดอินพุตสี่ตัวเชื่อมต่อกับบิตที่สำคัญที่สุดของพอร์ตของไมโครคอนโทรลเลอร์
เกี่ยวกับเรา
ALLELCO LIMITED
อ่านเพิ่มเติม
สอบถามรายละเอียดเพิ่มเติมอย่างรวดเร็ว
กรุณาส่งคำถามเราจะตอบกลับทันที
ทำไมต้องเลือกชิปหน่วยความจำ Adesto RM25C64DS-LTAI-B สำหรับโครงการของคุณ?
บน 10/10/2024
PC817 Optocoupler: ฟังก์ชั่นและแอพพลิเคชั่นที่ทันสมัย
บน 10/10/2024
โพสต์ยอดนิยม
-

คอมพิวเตอร์ชุดคำสั่งที่ซับซ้อน: พวกเขาเปลี่ยนการคำนวณอย่างไร?
บน 18/04/8000 147750
-

USB-C Pinout และคุณสมบัติ
บน 18/04/2000 111923
-

การใช้ Xilinx Unified Simulation Primitives: คู่มือที่ครอบคลุมสำหรับการออกแบบและการจำลอง FPGA
บน 18/04/1600 111349
-
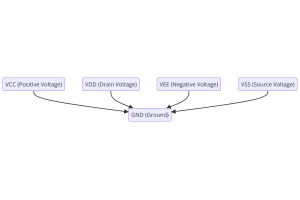
การทำความเข้าใจแรงดันไฟฟ้าของแหล่งจ่ายไฟในอิเล็กทรอนิกส์ VCC, VDD, VEE, VSS และ GND
บน 18/04/0400 83714
-

คู่มือเชื่อมต่อ RJ45: Pinout, การเดินสาย, ประเภทสายเคเบิลและการใช้งาน
บน 01/01/1970 79502
-

คู่มือที่ดีที่สุดสำหรับรหัสสีลวดในระบบไฟฟ้าที่ทันสมัย
วิธีที่ระบบไฟฟ้าของเราใช้สีไม่ได้มีไว้สำหรับรูปลักษณ์ตอนนี้สีลวดแต่ละอันบ่งบอกถึงฟังก์ชั่นเฉพาะทำให้ง่ายต่อการระบุและจัดการส่วนประกอบไฟฟ้าอย่างถูกต้องระหว่างการติดตั้งและบำรุงรักษาสิ่งนี้ไม่เพียง แ...บน 01/01/1970 66872
-
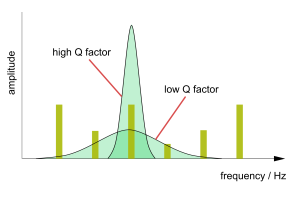
คุณภาพ (q) ปัจจัย: สมการและแอปพลิเคชัน
ปัจจัยด้านคุณภาพหรือ 'Q' เป็นสิ่งสำคัญเมื่อตรวจสอบว่าตัวเหนี่ยวนำและ resonators ทำงานได้ดีเพียงใดในระบบอิเล็กทรอนิกส์ที่ใช้ความถี่วิทยุ (RF)'Q' วัดว่าวงจรช่วยลดการสูญเสียพลังงานและส่งผลกระทบต่อช่วง...บน 01/01/1970 63005
-

คู่มือการล้างวาล์ว: ฟังก์ชั่นอาการการทดสอบและการเปลี่ยนประสิทธิภาพของเครื่องยนต์ที่ดีที่สุด
วาล์วล้างเป็นส่วนสำคัญของระบบรถยนต์ที่ช่วยให้อากาศสะอาดโดยการจัดการไอระเหยเชื้อเพลิงก่อนที่พวกเขาจะสามารถหลบหนีไปสู่ชั้นบรรยากาศได้สิ่งนี้ไม่เพียง แต่ช่วยสิ่งแวดล้อมด้วยการลดมลพิษ แต่ยังทำให้รถทำงา...บน 01/01/1970 62955
-
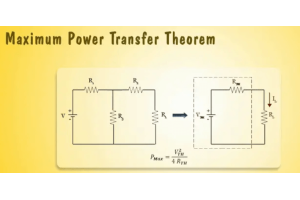
บรรลุประสิทธิภาพสูงสุดด้วยทฤษฎีการถ่ายโอนพลังงานสูงสุด
ทฤษฎีบทการถ่ายโอนพลังงานสูงสุดอธิบายว่าพลังงานจากแหล่งกำเนิดเช่นแบตเตอรี่หรือเครื่องกำเนิดไฟฟ้าจะไหลไปยังโหลดที่เชื่อมต่อได้อย่างไรมันแสดงเงื่อนไขที่แน่นอนที่โหลดได้รับพลังงานมากที่สุดบทความนี้ครอบ...บน 01/01/1970 54078
-

ข้อมูลจำเพาะและความเข้ากันได้ของแบตเตอรี่ A23
แบตเตอรี่ A23 เป็นแบตเตอรี่รูปทรงกระบอกขนาดเล็กที่มีแรงดันไฟฟ้าสูงเรียกอีกอย่างว่า 23A, 23AE หรือ MN21 มันทำงานที่ 12 โวลต์และสูงกว่าแบตเตอรี่ AA หรือ AAA มากการออกแบบพิเศษทำให้เหมาะสำหรับ...บน 01/01/1970 52092
หมายเลขชิ้นส่วนร้อน
-

AP2553FDC-7
Diodes Incorporated
IC PWR SWITCH P-CHANNEL 1:1 6DFN
REG1117FA-5.0/500
Texas Instruments
IC REG LIN 5V 1A DDPAK/TO263-3
DSPIC33CH64MP508-I/PT
Microchip Technology
IC MCU 16BIT 88KB FLASH 80TQFP
NVTFS5826NLWFTWG
onsemi
MOSFET N-CH 60V 7.6A 8WDFN
CL03C180JA3ANNC
Samsung Electro-Mechanics
CAP CER 18PF 25V C0G/NP0 0201
C1608X8R1H103M080AE
TDK Corporation
CAP CER 10000PF 50V X8R 0603
LTC1682IMS8-5#PBF
Analog Devices Inc.
IC REG CHARGE PUMP 5V 50MA 8MSOP
PXAS30KBA
Rochester Electronics, LLC
IC MCU 16BIT ROMLESS 68PLCC
C3216Y5V1C106Z
TDK Corporation
CAP CER 10UF 16V Y5V 1206
ADA4610-1ARZ-R7
Analog Devices Inc.
IC OPAMP JFET 1 CIRCUIT 8SOIC
BYM11-200-E3/97
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 200V 1A DO213AB
GRM2167U1H560JZ01D
Murata Electronics
CAP CER 56PF 50V U2J 0805
TOP258GN-TL
Power Integrations
IC OFFLINE SWITCH FLYBACK 8SMD
STM8S207RBT3
STMicroelectronics
IC MCU 8BIT 128KB FLASH 64LQFP
XC6701B502MR-G
Torex Semiconductor Ltd
IC REG LINEAR 5V 150MA SOT25
08053G104ZAT2A
AVX Corporation
CAP CER 0.1UF 25V Y5V 0805
BZM55B13-TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 13V 500MW MICROMELF
MCH5809-TL-E
onsemi
NCH+SBD 2.5V DRIVE SERIES -

BZD17C3V6P-E3-08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 3.6V 800MW DO219AB
DSRHD06-13
Diodes Incorporated
BRIDGE RECT 1P 600V 1A T-MINIDIP
BCX54-16E6327
Infineon Technologies
SMALL SIGNAL BIPOLAR TRANSISTOR
AD9961BCPZ
Analog Devices Inc.
IC BROADBAND FRONT-END 72LFCSP
AT80C51RD2-RLRUM
Microchip Technology
IC MCU 8BIT ROMLESS 44VQFP
PHK31NQ03LT,518
Nexperia USA Inc.
MOSFET N-CH 30V 30.4A 8SO
1469002-1
TE Connectivity AMP Connectors
CONN HDR HIGH SPEED 120POS PCB
S5JHE3_A/I
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 600V 5A DO214AB
SCAN90004TVS
Texas Instruments
IC REDRIVER LVDS 4CH 48TQFP
CD4025BCN
onsemi
IC GATE NOR 3CH 3-INP 14DIP
2225HC332KAT1A
KYOCERA AVX
CAP CER 3300PF 3KV X7R 2225
MN63Y1208-E1
Panasonic Electronic Components
IC RFID READR/TRAN 13.56MZ 16QFN
06035C112JAT2A
KYOCERA AVX
CAP CER 1100PF 50V X7R 0603
LFE3-95EA-8LFN672I
Lattice Semiconductor Corporation
IC FPGA 380 I/O 672FPBGA
XBS053V13R-G
Torex Semiconductor Ltd
DIODE SCHOTTKY 20V 500MA SOD323A
GRM0335C2A6R5CA01J
Murata Electronics
CAP CER 6.5PF 100V C0G/NP0 0201
STW36N55M5
STMicroelectronics
MOSFET N-CH 550V 33A TO247
C1608C0G2A090D080AA
TDK Corporation
CAP CER 9PF 100V C0G 0603 -
GRM1886P1H4R8CZ01D
Murata Electronics
CAP CER 4.8PF 50V P2H 0603
M29W128FL70N6E
Micron Technology Inc.
IC FLASH 128MBIT PARALLEL 56TSOP
70MT100KB
Vishay General Semiconductor - Diodes Division
BRIDGE RECT 3PHASE 1KV 70A MTK
ADXL344ACCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 16LGA
BZX84C39-HE3-08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 39V 300MW SOT23-3
1735447-7
TE Connectivity AMP Connectors
CONN RCPT HSG 7POS 2.00MM
1808AA150JAT1A
KYOCERA AVX
CAP CER 15PF 1KV NP0 1808
Z84C4106PEC
Zilog
IC INTERFACE SPECIALIZED 40DIP
GRM1555C1H7R4WZ01D
Murata Electronics
CAP CER 7.4PF 50V C0G/NP0 0402
BDCN-20-13+
Mini-Circuits
RF DIR COUPLER 360MHZ-1GHZ 6SMD
MCC19-14IO1B
IXYS
MOD THYRISTOR DUAL 1400V TO240AA
OP467GPZ
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14DIP
LA4636-E
Sanyo
11 WATT 2-CHANNEL BTL AF POWER A
P6KE82A-T
Diodes Incorporated
TVS DIODE 70.1VWM 113VC DO15
NCV7608DWR2G
onsemi
IC HALF BRIDGE DRIVER 28SOIC
TLJA227M004R1100
KYOCERA AVX
CAP TANT 220UF 20% 4V 1206
TUSB2136PM
Texas Instruments
IC USB HUB I/O CONTROL 64-LQFP
HUFA75637P3
onsemi
MOSFET N-CH 100V 44A TO220-3