L298 Motor Driver IC: คุณสมบัติ, pinout และแอปพลิเคชัน
บทความนี้นำเสนอความลึกลงไปในฟังก์ชันการทำงานและการใช้งานของ L298 Motor Driver IC สำรวจความสามารถเต็มรูปแบบสองอันซึ่งอำนวยความสะดวกในการควบคุมมอเตอร์สองตัวที่เป็นอิสระซึ่งเป็นคุณสมบัติที่ช่วยเพิ่มฟังก์ชั่นการทำงานของโครงการหุ่นยนต์โดยเปิดใช้งานการซ้อมรบที่ซับซ้อนเช่นพวงมาลัยที่แตกต่างความสามารถของ IC ในการจัดการกับกระแสสูงพูดถึงความน่าเชื่อถือและความทนทานในการเรียกร้องสถานการณ์พิสูจน์ให้เห็นว่าเป็นผู้เล่นหลักในการขยายชีวิตการปฏิบัติงานและประสิทธิภาพของโครงการที่ขับเคลื่อนด้วยมอเตอร์แคตตาล็อก
ภาพรวมของ L298 Motor Driver IC
L298 Motor Driver IC ขยายศักยภาพของรุ่นก่อนคือ L293 โดยนำเสนอคุณสมบัติที่ได้รับการเสริมสมรรถนะการรวมเข้าด้วยกันอย่างไร้รอยต่อกับตรรกะ TTL มันจัดการกับโหลดอุปนัยที่หลากหลายเช่น DC และมอเตอร์สเต็ปเปอร์ทำหน้าที่เป็นแอมพลิฟายเออร์ปัจจุบันมันช่วยเพิ่มสัญญาณที่อ่อนแอเพื่อเพิ่มพลังให้มอเตอร์ได้อย่างมีประสิทธิภาพที่แกนกลางของมัน L298 มีแอมพลิฟายเออร์พลังงานสี่ตัวที่สร้าง H-Bridges สองเส้นที่แตกต่างกันคือ A และ B โครงสร้างเหล่านี้มีความสำคัญสำหรับการควบคุมขั้วมอเตอร์และเปิดใช้งานการทำงานของมอเตอร์สเต็ป
H-Bridge แต่ละตัวอำนวยความสะดวกในทิศทางมอเตอร์และการควบคุมความเร็วอย่างมีประสิทธิภาพมักใช้การตั้งค่านี้เพื่อเปลี่ยนทิศทางมอเตอร์แบบไดนามิกโดยไม่จำเป็นต้องใช้สวิตช์เชิงกลวิธีนี้ช่วยเพิ่มความน่าเชื่อถือและอายุยืนโดยเสนอตัวเลือกที่ยืดหยุ่นสำหรับโครงการระบบอัตโนมัติออกแบบมาเพื่อทำงานกับตรรกะ 5V TTL สำหรับทั้งการเปิดใช้งานและพินอินพุต L298 จับคู่กับไมโครคอนโทรลเลอร์ต่าง ๆ ที่ใช้ในระบบอัตโนมัติและหุ่นยนต์
การใช้ Sinks Heat และแหล่งพลังงานที่เหมาะสมเป็นเรื่องธรรมดาเพื่อให้มั่นใจถึงประสิทธิภาพที่เหนือกว่าโดยเน้นความเข้าใจที่เหมาะสมของขอบเขตการปฏิบัติงานของอุปกรณ์ในระหว่างการใช้งาน L298 ทำให้มั่นใจได้ว่าการเชื่อมต่อที่มั่นคงและการรักษาความสมบูรณ์ของสัญญาณจะได้รับการจัดลำดับความสำคัญเพื่อลดข้อผิดพลาดในการควบคุมมอเตอร์วิธีการนี้เห็นได้ชัดในโครงการที่ต้องการความแม่นยำและความสอดคล้องเสน่ห์ของ L298 อยู่ในการตอบสนองต่อความต้องการที่หลากหลายเชื่อมโยงสภาพแวดล้อมการเรียนรู้ที่เรียบง่ายด้วยแอพพลิเคชั่นอุตสาหกรรมขั้นสูงความเก่งกาจนี้ช่วยให้สถานที่ในภูมิทัศน์การพัฒนาของอุปกรณ์อิเล็กทรอนิกส์และการควบคุมมอเตอร์
การกำหนดค่าพินของ L298 มอเตอร์ไดรเวอร์ IC
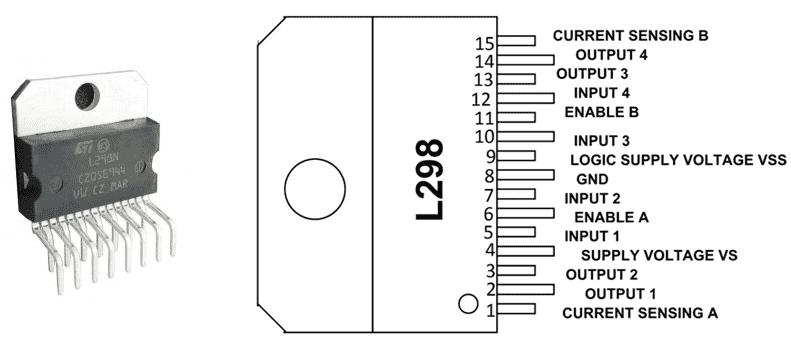
•พิน 1 (การตรวจจับกระแส a): พินนี้ตรวจสอบและควบคุมกระแสกระแสผ่านโหลดที่เชื่อมต่อกับ H-bridge A.
•พิน 2 & 3 (เอาท์พุท 1 & 2): พินเหล่านี้ทำหน้าที่เป็นเอาต์พุตสำหรับ H-Bridge A, ส่งกระแสไฟฟ้าไปยังโหลดและถูกตรวจสอบโดย PIN 1
• PIN 4 (VS): PIN นี้เชื่อมต่อกับแหล่งจ่ายไฟ +5V
•พิน 5 & 7 (อินพุต): พินเหล่านี้ควบคุม H-Bridge A และเข้ากันได้กับระดับตรรกะ TTL
• PIN 6 (เปิดใช้งาน A): PIN นี้ใช้เพื่อเปิดใช้งาน H-Bridge A และยังเข้ากันได้กับ TTL
•พิน 8 (GND): นี่คือการเชื่อมต่อภาคพื้นดิน
•พิน 9 (แหล่งจ่ายแรงดันไฟฟ้าลอจิก): พินนี้ให้แรงดันไฟฟ้าสำหรับวงจรลอจิก
•พิน 10 & 12 (อินพุต 3 & 4): หมุดเหล่านี้ควบคุม H-Bridge B และเข้ากันได้กับ TTL
• PIN 11 (เปิดใช้งาน B): PIN นี้เปิดใช้งาน H-Bridge B และเข้ากันได้กับ TTL
•พิน 13 & 14 (เอาท์พุท 3 & 4): พินเหล่านี้ทำหน้าที่เป็นเอาต์พุตสำหรับ H-Bridge B โดยมีการตรวจสอบปัจจุบันดำเนินการโดย PIN 15
ข้อกำหนดของ L298 IC
|
ข้อกำหนด |
รายละเอียด |
|
การจัดหาแรงดันไฟฟ้า |
สูงสุด 46V |
|
ปัจจุบัน DC ทั้งหมด |
สูงถึง 4a |
|
แรงดันไฟฟ้าอิ่มตัวต่ำ |
ใช่ |
|
การป้องกันอุณหภูมิสูง |
ใช่ |
|
การกระจายพลังงาน |
25W |
|
ช่วงแรงดันไฟฟ้า |
+5V ถึง +46V |
|
แรงดันไฟฟ้าสูงสุด |
50V |
|
อินพุตสูงสุดและเปิดใช้งานแรงดันไฟฟ้า |
+7V |
|
อินพุตควบคุม TTL |
ใช่ |
|
ช่วงอุณหภูมิการจัดเก็บ |
-40 ° C ถึง 150 ° C |
|
ช่วงอุณหภูมิการทำงาน |
-23 ° C ถึง 130 ° C |
|
การไหลของกระแสสูงสุดที่อนุญาตต่อเอาต์พุต |
3a |
L298 Motor Driver IC Circuit Designs
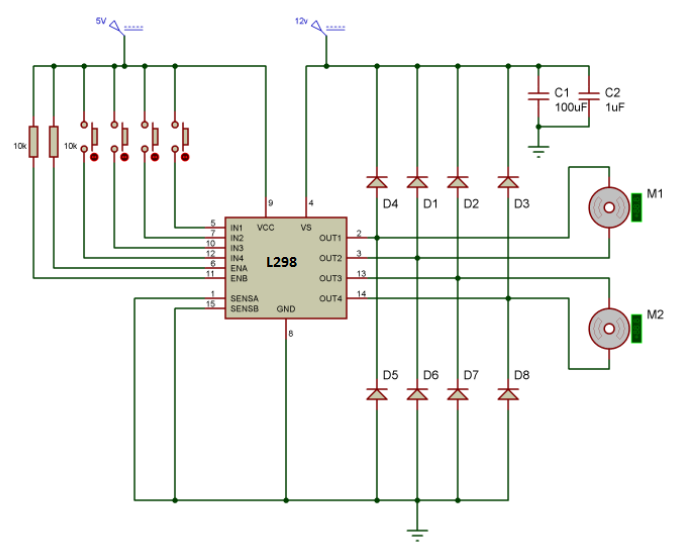
การนำ L298 ไปสู่แอพพลิเคชั่นที่หลากหลายช่วยเพิ่มประสิทธิภาพการควบคุมมอเตอร์สิ่งนี้เกี่ยวข้องกับการตั้งค่าวงจรที่ชัดเจนโดยใช้ศักยภาพเต็มรูปแบบของคุณสมบัติของ L298ที่แกนกลางอยู่ H-Bridge A สำหรับฟังก์ชั่นมอเตอร์ปุ่มกดที่วางตำแหน่งอย่างรอบคอบสองปุ่มกำหนดอินพุตตรรกะเพื่อคัดท้ายทิศทางมอเตอร์อินพุตเหล่านี้เปิดใช้งานการกระทำอย่างราบรื่นเช่นไปข้างหน้าย้อนกลับและหยุดอย่างรวดเร็วในบริบทต่าง ๆ ข้อเสนอแนะที่สัมผัสได้นี้จะเพิ่มความแม่นยำให้เพิ่มความแม่นยำในการดำเนินการตามธรรมชาติของการดำเนินงาน
ไดโอด flyback ถูกรวมเข้ากับแรงดันไฟฟ้าแหลมระหว่างฟังก์ชั่นมอเตอร์ไดโอดเหล่านี้เป็นส่วนประกอบของวงจรวงจรดังนั้นจึงส่งเสริมอายุการใช้งานที่ยืนยาวการจัดการกับสัญญาณรบกวนแม่เหล็กไฟฟ้ามีบทบาทในการรักษาความสมบูรณ์ของระบบการควบคุมPIN เปิดใช้งานควบคุมการทำงานของไดรเวอร์มอเตอร์การเปิดใช้งาน PIN นี้ช่วยให้สามารถควบคุมมอเตอร์อย่างละเอียดและการปรับปรุงประสิทธิภาพในสถานการณ์ต่าง ๆสิ่งนี้แสดงให้เห็นถึงความสามารถในการปรับตัวของ L298 กับสภาพแวดล้อมที่แตกต่างกันป้ายกำกับ Q1 และ Q2 เสนอการควบคุมทิศทางมอเตอร์ที่แม่นยำตัวอย่างเช่น Q1 สูงและ Q2 ต่ำส่งผลให้เกิดการเคลื่อนไหวไปข้างหน้าในขณะที่การย้อนกลับเปิดใช้งานการเคลื่อนไหวย้อนกลับมันให้ความสำคัญกับการประสานงานอย่างพิถีพิถันที่จำเป็นสำหรับประสิทธิภาพสูงสุด
แอพพลิเคชั่นของ L298 Motor Driver IC
หุ่นยนต์และระบบอัตโนมัติ
L298 เชื่อมโยงไมโครคอนโทรลเลอร์แรงดันไฟฟ้าต่ำพร้อมมอเตอร์พลังสูงในหุ่นยนต์การกำหนดค่า H-Bridge ที่แข็งแกร่งจัดการงานที่ต้องการงานด้านพลังงานซึ่งจัดการกับความท้าทายในการควบคุมการใช้ L298 ช่วยเพิ่มความแม่นยำในการควบคุมมอเตอร์ซึ่งมีส่วนทำให้เกิดการพัฒนาระบบหุ่นยนต์ว่องไว
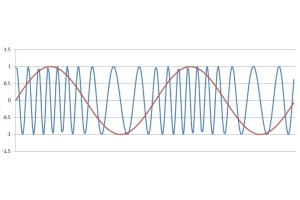
ความสามารถในการปรับเปลี่ยนความกว้างของพัลส์ (PWM)
L298 จัดการ PWM อย่างเชี่ยวชาญให้การควบคุมความเร็วมอเตอร์ DC ที่ราบรื่นมันปรับให้เข้ากับสถานการณ์ที่จำเป็นในการปรับความเร็วอย่างละเอียดข้อมูลเชิงลึกของอุตสาหกรรมเน้นว่าการบูรณาการ PWM เข้ากับ L298 เพิ่มประสิทธิภาพการใช้พลังงานและยืดอายุการใช้งานมอเตอร์ซึ่งมีผลต่อการดึงดูดความสนใจในการใช้งานทางเทคโนโลยีที่หลากหลาย
ความเข้ากันได้ของเอาต์พุต TTL
L298 ตรงกับความต้องการควบคุมเอาต์พุต TTL อย่างราบรื่นอำนวยความสะดวกในการเชื่อมต่อที่ง่ายกับไมโครคอนโทรลเลอร์ความเข้ากันได้นี้ส่งเสริมการออกแบบระบบที่มีความคล่องตัวทำให้ส่วนประกอบอิเล็กทรอนิกส์ที่หลากหลายสามารถทำงานร่วมกันได้อย่างกลมกลืนL298 ลดความซับซ้อนของสถาปัตยกรรมวงจรลดความซับซ้อนในขณะที่เพิ่มความน่าเชื่อถือ
การรวมมอเตอร์ DC
ในบริบทที่ต้องการประสิทธิภาพและความน่าเชื่อถือ L298 อำนวยความสะดวกในการรวมมอเตอร์ DC กับไมโครคอนโทรลเลอร์การใช้ความสามารถของมันส่งผลให้เกิดการทำงานที่ราบรื่นและประสิทธิภาพที่ดีขึ้นการศึกษาบ่งชี้ว่าระบบที่ใช้ประโยชน์จาก L298 ได้รับประโยชน์จากความสามารถในการปรับขนาดได้เพิ่มขอบเขตการปฏิบัติงานในสภาพแวดล้อมที่หลากหลาย
บทสรุป
L298 Motor Driver IC ให้โซลูชันที่หลากหลายและมีประสิทธิภาพสำหรับการควบคุมมอเตอร์ DCความสามารถในการจัดการมอเตอร์คู่อย่างอิสระควบคู่ไปกับการจัดการกระแสน้ำสูงทำให้เป็นเครื่องมือที่มีค่าสำหรับทุกคนที่เกี่ยวข้องกับหุ่นยนต์และการออกแบบระบบอัตโนมัติการบูรณาการคุณสมบัติเช่นการป้องกันความร้อนและความเข้ากันได้กับระดับแรงดันไฟฟ้าที่หลากหลายช่วยเน้นการใช้งานจริงและการปรับตัวเพื่อให้มั่นใจว่าเป็นไปตามข้อกำหนดทางเทคนิคที่หลากหลายการสำรวจ L298 ในบทความนี้ไม่เพียง แต่ให้ความกระจ่างเกี่ยวกับข้อกำหนดทางเทคนิคและแอพพลิเคชั่นที่มีศักยภาพ แต่ยังแสดงบทบาทในการพัฒนาเทคโนโลยีการควบคุมมอเตอร์
เกี่ยวกับเรา
ALLELCO LIMITED
อ่านเพิ่มเติม
สอบถามรายละเอียดเพิ่มเติมอย่างรวดเร็ว
กรุณาส่งคำถามเราจะตอบกลับทันที
2N3904 คู่มือทรานซิสเตอร์: คุณสมบัติการใช้และแผ่นข้อมูลที่สมบูรณ์
บน 03/10/2024

TLV3201AQDCKRQ1 ตัวเปรียบเทียบแรงดันไฟฟ้า: ฟังก์ชั่นและหลักการปฏิบัติการ
บน 02/10/2024
โพสต์ยอดนิยม
-
GND ในวงจรคืออะไร?
บน 01/01/1970 2932
-

คู่มือเชื่อมต่อ RJ-45: รหัสสีตัวเชื่อมต่อ RJ-45, แผนการเดินสาย, แอปพลิเคชัน R-J45, RJ-45 Datasheets
บน 01/01/1970 2485
-

ประเภทตัวเชื่อมต่อไฟเบอร์: SC vs LC และ LC กับ MTP
บน 01/01/1970 2077
-
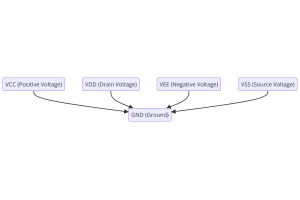
การทำความเข้าใจแรงดันไฟฟ้าของแหล่งจ่ายไฟในอิเล็กทรอนิกส์ VCC, VDD, VEE, VSS และ GND
บน 08/11/0400 1871
-

การเปรียบเทียบระหว่าง DB9 และ RS232
บน 01/01/1970 1758
-

แบตเตอรี่ LR44 คืออะไร?
กระแสไฟฟ้าที่ใช้กำลังแพร่หลายแทรกซึมทุกแง่มุมของชีวิตประจำวันของเราตั้งแต่อุปกรณ์เล็กน้อยไปจนถึงอุปกรณ์การแพทย์ที่คุกคามชีวิตมันมีบทบาทเงียบอย่างไรก็ตามการเข้าใจพลังงานนี้อย่างแท้จริงโดยเฉพาะอย่างยิ่ง...บน 01/01/1970 1707
-
การทำความเข้าใจพื้นฐาน: การต่อต้านการเหนี่ยวนำและความสามารถพิเศษ
ในการเต้นรำที่ซับซ้อนของวิศวกรรมไฟฟ้าทั้งสามองค์ประกอบพื้นฐานต้องใช้เวทีกลาง: การเหนี่ยวนำความต้านทานและความจุแต่ละหมีมีลักษณะเฉพาะที่กำหนดจังหวะแบบไดนามิกของวงจรอิเล็กทรอนิกส์ที่นี่เราเริ่มต้นการเดินท...บน 01/01/1970 1649
-

คู่มือการใช้แบตเตอรี่ CR2430: ข้อมูลจำเพาะแอปพลิเคชันและการเปรียบเทียบกับแบตเตอรี่ CR2032
แบตเตอรี่ CR2430 คืออะไร?ประโยชน์ของแบตเตอรี่ CR2430บรรทัดฐานแอปพลิเคชันแบตเตอรี่ CR2430CR2430 เทียบเท่าCR2430 เทียบกับ CR2032ขนาดแบตเตอรี่ CR2430สิ่งที่จะมองหาเมื่อซื้อ CR2430 และเทียบเท่าแผ่นข้อมูล PDFคำถามที่พบบ่อย แบตเตอรี่เป็นห...บน 01/01/1970 1536
-
RF คืออะไรและทำไมเราถึงใช้มัน?
เทคโนโลยีความถี่วิทยุ (RF) เป็นส่วนสำคัญของการสื่อสารไร้สายที่ทันสมัยทำให้สามารถส่งข้อมูลในระยะทางไกลได้โดยไม่ต้องเชื่อมต่อทางกายภาพบทความนี้นำเสนอพื้นฐานของ RF อธิบายว่ารังสีแม่เหล็กไฟฟ้า (EMR) ทำให้การสื่อส...บน 01/01/1970 1530
-

CR2450 เทียบกับ CR2032: แบตเตอรี่สามารถใช้แทนได้หรือไม่?
แบตเตอรี่ลิเธียมแมงกานีสมีความคล้ายคลึงกับแบตเตอรี่ลิเธียมอื่น ๆความหนาแน่นของพลังงานสูงและอายุการใช้งานที่ยาวนานเป็นลักษณะที่พวกเขามีเหมือนกันแบตเตอรี่ชนิดนี้ได้รับความไว้วางใจและเป็นที่โปรดปรานของผู...บน 01/01/1970 1500
หมายเลขชิ้นส่วนร้อน
-

BZX84C3V6W-7-F
Diodes Incorporated
DIODE ZENER 3.6V 200MW SOT323
S25FL128SAGMFI001
Infineon Technologies
IC FLASH 128MBIT SPI/QUAD 16SOIC
KA79M12TU
onsemi
IC REG LINEAR -12V 500MA TO220-3
PS7801K-1A-A
CEL
SSR RELAY SPST-NO 40MA 0-80V
HCPL-3120-360E
Broadcom Limited
OPTOISO 3.75KV GATE DRVR 8DIP GW
CYPD6127-48LQXIT
Infineon Technologies
CCG6
MAX3801UTG+T
Analog Devices Inc./Maxim Integrated
IC INTERFACE SPECIALIZED 24TQFN
PIC16F15256-I/SS
Microchip Technology
IC MCU 8BIT 28KB FLASH 28SSOP
SG3503DM
Microchip Technology
IC VREF SERIES 1% 8SOIC
MBRD320T4G
onsemi
DIODE SCHOTTKY 20V 3A DPAK
170M3264
Eaton - Bussmann Electrical Division
FUSE SQUARE 160A 700VAC RECT
GE28F640C3TC80
Intel
IC FLASH 64MBIT PARALLEL 48VFBGA
DSPIC33FJ32GS406-I/PT
Microchip Technology
IC MCU 16BIT 32KB FLASH 64TQFP
SP8K5FU6TB
Rohm Semiconductor
MOSFET 2N-CH 30V 3.5A 8SOIC
UMK105CG471JVHF
Taiyo Yuden
CAP CER 470PF 50V C0G/NP0 0402
L128-5080CA3500001
Lumileds
COOL-WHITE 2835C 3V 80 CRI FULL
SC4626HSKTRT
Semtech Corporation
IC REG BUCK 1.5V 1A SOT23-5
TPS62054DGSRG4
Texas Instruments
IC REG BCK 1.8V 0.8A SYNC 10MSOP -

AD7228KPZ
Analog Devices Inc.
IC DAC 8BIT V-OUT 28PLCC
ESD10201MUT5G
onsemi
TRANSISTOR VOLTAGE SUPPRESSOR DI
TLV809EA26DBZR
Texas Instruments
IC SUPERVISOR 1 CHANNEL SOT23-3
BA178M08FP-E2
Rohm Semiconductor
IC REG LINEAR 8V 500MA TO252-3
MCR25MG
Littelfuse Inc.
SCR 600V 25A TO220AB
SI2333DS-T1-GE3
Vishay Siliconix
MOSFET P-CH 12V 4.1A SOT23-3
VBO52-18NO7
IXYS
BRIDGE RECT 1P 1.8KV 52A PWS-D
MAX1698EUB+
Analog Devices Inc./Maxim Integrated
IC LED DRIVER CTRLR 10UMAX
MC9S12E64CPVE
Freescale Semiconductor
IC MCU 16BIT 64KB FLASH 112LQFP
LT3021ES8-1.2#PBF
Analog Devices Inc.
IC REG LINEAR 1.2V 500MA 8SOIC
LM1815MX
Texas Instruments
IC AMP ADAPTIV VAR SENSOR 14SOIC
TLV1702AIRUGR
Texas Instruments
IC COMPARATOR 2 GEN PUR 8X2QFN
DEMO9S12HY64
NXP USA Inc.
MC9S12HY64 EVAL BRD
DF37B-30DP-0.4V(51)
Hirose Electric Co Ltd
CONN HDR 30POS SMD GOLD
VOM618A-7X001T
Vishay Semiconductor Opto Division
OPTOISOLATOR 3.75KV TRANS 4-SOP
0603ZC104MAT4A
KYOCERA AVX
CAP CER 0.1UF 10V X7R 0603
GRM3196T1H621JD01D
Murata Electronics
CAP CER 620PF 50V T2H 1206
TCM809TENB713
Microchip Technology
IC SUPERVISOR 1 CHANNEL SOT23-3 -

GRM1555C1H2R5WZ01D
Murata Electronics
CAP CER 2.5PF 50V C0G/NP0 0402
AS1907C16-T
ams OSRAM
IC SUPERVISOR 1 CHANNEL SOT23-3
GAL22V10D-15LP
Lattice Semiconductor Corporation
IC CPLD 10MC 15NS 24DIP
08051U2R7BAT4A
KYOCERA AVX
CAP CER 2.7PF 100V C0G/NP0 0805
MAX547AEMH+
Analog Devices Inc./Maxim Integrated
IC DAC 13BIT OCTAL PAR 44-MQFP
0603YA101MAT4A
KYOCERA AVX
CAP CER 100PF 16V C0G/NP0 0603
LAN91C111I-NU
Microchip Technology
IC ETHERNET CTLR MAC PHY 128TQFP
DRV5056A3QLPGM
Texas Instruments
SENSOR HALL EFFECT ANALOG
GRM0225C1E8R4BDAEL
Murata Electronics
CAP CER 8.4PF 25V C0G/NP0 01005
JQ1A-12V-F
Panasonic Electric Works
RELAY GEN PURPOSE SPST 5A 12V
CD4041UBF
Texas Instruments
CMOS QUAD TRUE/COMPLEMENT BUFFER
DS1230AB-120
Analog Devices Inc./Maxim Integrated
IC NVSRAM 256KBIT PAR 28EDIP
08051A561JAJ2A
KYOCERA AVX
CAP CER 560PF 100V NP0 0805
1N1190A
Solid State Inc.
DIODE GEN PURP 600V 40A DO5
M24512-WDW6TP
STMicroelectronics
IC EEPROM 512KBIT I2C 8TSSOP
STPCI2HEYC
STMicroelectronics
IC SYSTEM-ON-CHIP X86 516BGA
AT25040N-10SC-2.7
Microchip Technology
IC EEPROM 4KBIT SPI 3MHZ 8SOIC
NDS8435
onsemi
MOSFET P-CH 30V 7A 8SOIC