TB6600HG Stepper Motor Driver: ข้อมูลจำเพาะคุณสมบัติและแอปพลิเคชัน
แคตตาล็อก
คำอธิบาย tb6600hg

tb6600hg เป็นประเภท Chopper PWM ชนิดหนึ่งชิป bipolar sinusoidal microstepping motor driverมันสามารถบรรลุการควบคุมการหมุนไปข้างหน้าและย้อนกลับผ่าน 2 เฟส, 1-2 เฟส, W1-2-phase, 2W1-2-phase และโหมดการกระตุ้น 4W1-2-phaseมอเตอร์สเต็ปสองขั้ว 2 เฟสถูกขับเคลื่อนโดยสัญญาณนาฬิกาที่มีประสิทธิภาพสูง แต่เพียงผู้เดียว
ทางเลือกและเทียบเท่า:
- tb6600fg
- L6258EX
ข้อมูลจำเพาะของ TB6600HG
•สถานะชิ้นส่วน: ใช้งานอยู่
•บรรจุภัณฑ์: ถาด
•แพ็คเกจ / เคส: HZIP-25
•ผู้ผลิต: โตชิบา
•การดำเนินงานการจัดหาปัจจุบัน: 4.2 ma
•แรงดันไฟฟ้าในการดำเนินงาน: 2 V ถึง 5.5 V
•การจัดอันดับแรงดันไฟฟ้า: 8 V ถึง 42 V
•จำนวนเอาต์พุต: 2 เอาต์พุต
• PD - การกระจายพลังงาน: 40 W
•สไตล์การติดตั้ง: ผ่านหลุม
•ความยาวแพ็คเกจ/ความกว้าง/ความสูง: 29.3 มม. (สูงสุด) /4.5mm/15.7 มม.
•หมวดหมู่ผลิตภัณฑ์: ตัวควบคุมมอเตอร์ / การเคลื่อนไหว / จุดระเบิดและไดรเวอร์
เงื่อนไขการทำงานของ TB6600HG
(ta = -30 ° C ถึง 85 ° C)
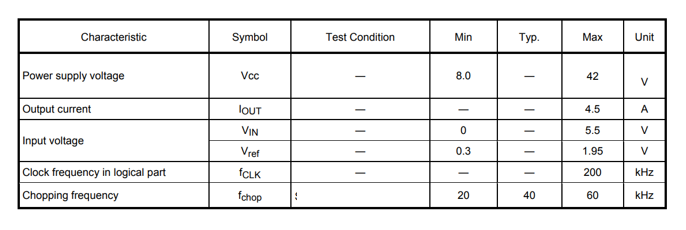
หมายเหตุ: เทอร์มินัล VCC สองตัวควรตั้งโปรแกรมแรงดันไฟฟ้าเดียวกันกระแสสูงสุดของช่วงการดำเนินงานไม่สามารถดำเนินการได้ขึ้นอยู่กับเงื่อนไขต่าง ๆ เนื่องจากกระแสไฟฟ้าถูก จำกัด โดยการกระจายพลังงาน PDตรวจสอบให้แน่ใจว่าหลีกเลี่ยงการใช้ IC ในสภาพที่จะทำให้อุณหภูมิเกิน TJ (avg.) = 107 ° C
แรงดันไฟฟ้าของแหล่งจ่ายไฟที่ 42 V และกระแสเอาต์พุตของ 4.5 A คือค่าสูงสุดของช่วงการทำงานโปรดออกแบบวงจรที่มีความยาวเพียงพอภายในช่วงนี้โดยพิจารณาจากการเปลี่ยนแปลงของแหล่งจ่ายไฟความต้านทานภายนอกและลักษณะทางไฟฟ้าของ ICในกรณีที่มีแรงดันไฟฟ้าเกิน 42 V และกระแสเอาต์พุตที่ 4.5 A, IC จะไม่ทำงานตามปกติ
จะเชื่อมต่อ TB6600HG เข้ากับระบบควบคุมได้อย่างไร?
การเชื่อมต่อพลังงาน: ก่อนอื่นตรวจสอบให้แน่ใจว่าได้จัดหาแหล่งจ่ายไฟที่เหมาะสมถึง TB6600HGเมื่อเปิดเครื่อง TB6600HG คุณมักจะต้องเชื่อมต่อสองพิน: VCC (แหล่งจ่ายไฟบวก) และ GND (สายดิน)พิน VCC มีหน้าที่ในการจัดหาแรงดันไฟฟ้าที่จำเป็นในการขับชิปในขณะที่พิน GND ทำหน้าที่เป็นระดับพื้นดินอ้างอิงเราจำเป็นต้องตรวจสอบให้แน่ใจว่าแหล่งจ่ายไฟมีความเสถียรและตรงตามข้อกำหนดของ TB6600HG
การเชื่อมต่อสัญญาณ: ตามความต้องการเฉพาะของระบบควบคุมเราจำเป็นต้องเชื่อมต่อสัญญาณควบคุมกับพินที่สอดคล้องกันของชิปไดรเวอร์ TB6600HGสัญญาณควบคุมเหล่านี้มักจะรวมถึงสัญญาณควบคุมทิศทางและสัญญาณชีพจรขั้นตอน ฯลฯ ซึ่งรับผิดชอบในการสอนว่ามอเตอร์ทำหน้าที่อย่างไรรวมถึงทิศทางของการหมุนและความเร็วในการหมุน
การเชื่อมต่อมอเตอร์: เราต้องระมัดระวังเป็นพิเศษเมื่อเชื่อมต่อมอเตอร์เข้ากับชิปไดรเวอร์ TB6600HGสายไฟทั้งสองของมอเตอร์มักจะเป็นสีแดงและสีดำแสดงถึงเสาบวกและลบของมอเตอร์ตามลำดับสายสีแดงมักจะเชื่อมต่อกับขั้วบวกของมอเตอร์ในขณะที่สายสีดำเชื่อมต่อกับขั้วลบ
การเชื่อมต่อข้อเสนอแนะ (เป็นทางเลือก): หากใช้ตัวเข้ารหัสสำหรับการควบคุมความคิดเห็นเรายังต้องเชื่อมต่อสัญญาณเอาต์พุตของตัวเข้ารหัสเข้ากับระบบควบคุมโดยทั่วไปแล้วจะรวมถึงเอาต์พุตของเฟส A, เฟส B และเฟส Z (ถ้ามี)
การต่อสายดิน: เราต้องตรวจสอบให้แน่ใจว่าสายพื้นดินทั่วไปของอุปกรณ์ทั้งหมดเชื่อมต่ออย่างถูกต้องเพื่อหลีกเลี่ยงการรบกวนและความเสียหาย
การตั้งค่าการเริ่มต้น: หลังจากการเชื่อมต่อเสร็จสมบูรณ์เราจำเป็นต้องเริ่มต้นการตั้งค่าของ TB6600HG เพื่อให้แน่ใจว่าทำงานได้อย่างถูกต้องซึ่งอาจรวมถึงการตั้งค่าขีด จำกัด ปัจจุบันโหมดการก้าว ฯลฯ
คุณสมบัติผลิตภัณฑ์ TB6600HG
•ใช้หม้อน้ำขยายเพื่อการกระจายความร้อนที่ดี
•คำแนะนำการตั้งค่าการแบ่งย่อยถูกพิมพ์ที่ด้านหลังของบอร์ด
•ด้วยฟังก์ชั่นการป้องกันการลัดวงจรเอาท์พุทการใช้อย่างไม่ต้องกังวล
•ใช้การมีเพศสัมพันธ์ด้วยแสงความเร็วสูง 6N137 เพื่อให้แน่ใจว่าความเร็วสูงโดยไม่สูญเสียการซิงโครไนซ์
•กระแสไฟเอาท์พุทสามารถปรับได้อย่างไม่หยุดยั้งเพื่อตอบสนองความต้องการแอปพลิเคชันต่างๆของคุณ
•การใช้โหมดอินพุตขั้วบวกทั่วไปมีเทอร์มินัลอินพุตสองตัวทำให้การเดินสายสะดวกมากขึ้น
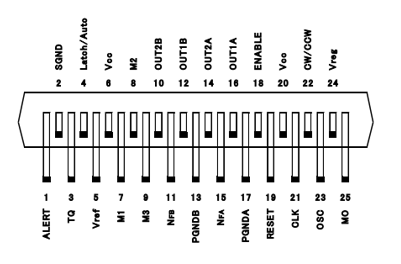
การกำหนดค่า PIN ของ TB6600HG
ฟังก์ชั่นคำอธิบายของ tb6600hg
การตั้งค่าการกระตุ้น
โหมดการกระตุ้นสามารถเลือกได้จากแปดโหมดต่อไปนี้โดยใช้อินพุต M1, M2 และ M3เมื่ออินพุต M1, M2 หรือ M3 ถูกเลื่อนระหว่างการทำงานของมอเตอร์โหมดการกระตุ้นใหม่จะเริ่มต้นจากโหมดเริ่มต้นซึ่งอาจรบกวนความต่อเนื่องของรูปคลื่นกระแสเอาต์พุต
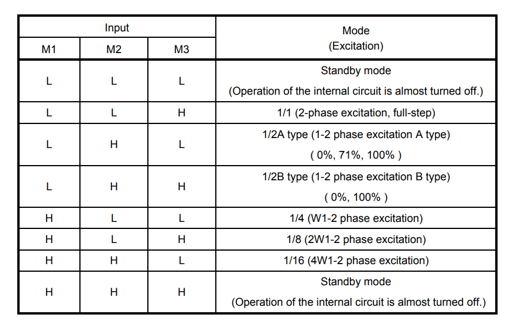
หมายเหตุ: หากต้องการเปลี่ยนโหมดที่น่าตื่นเต้นโดยการเปลี่ยน M1, M2 และ M3 ตรวจสอบให้แน่ใจว่าไม่ตั้งค่า M1 = M2 = M3 = L หรือ M1 = M2 = M3 = H.
โหมดสแตนด์บาย
โหมดการทำงานจะย้ายไปยังโหมดสแตนด์บายภายใต้เงื่อนไข M1 = M2 = M3 = L หรือ M1 = M2 = M3 = H. การใช้พลังงานจะลดลงโดยการปิดการดำเนินการทั้งหมดยกเว้นการป้องกันการดำเนินการในโหมดสแตนด์บายเทอร์มินัลเอาท์พุท MO คือ Hzโหมดสแตนด์บายถูกปล่อยออกมาโดยการเปลี่ยนสถานะของ m1 = m2 = m3 = l และ m1 = m2 = m3 = h เป็นสถานะอื่นสัญญาณอินพุตไม่ได้รับการยอมรับประมาณ 200 μsหลังจากปล่อยโหมดสแตนด์บาย
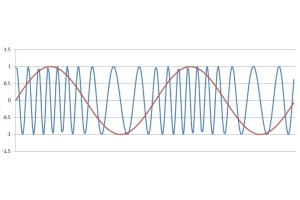
โหมดการสลายตัว
การชาร์จและการปลดปล่อยกระแสในโหมด PWM มักจะต้องใช้เวลาประมาณห้ารอบใน OSCMโหมดการสลายตัวเร็ว 40 เปอร์เซ็นต์เริ่มต้นโดยการกระตุ้นการสลายตัวภายในสองรอบสุดท้ายของโหมดการสลายตัวเร็วโดยมีอัตราส่วนที่เหลืออยู่ 40 เปอร์เซ็นต์ความสัมพันธ์ระหว่างความถี่สัญญาณนาฬิกาหลัก (FMCLK), ความถี่ OSCM (FOSCM) และความถี่ PWM (FCHOP) จะแสดงดังนี้:
foscm = 1/20 × fmclk
fChop = 1/100 × fmclk
เมื่อ ROSC = 51KΩ, นาฬิกาต้นแบบ = 4MHz, OSCM = 200KHz, ความถี่ของ PWM (FCHOP) = 40KHz
โหมดเริ่มต้น
เมื่อใช้การรีเซ็ตกระแสเฟสมีดังนี้
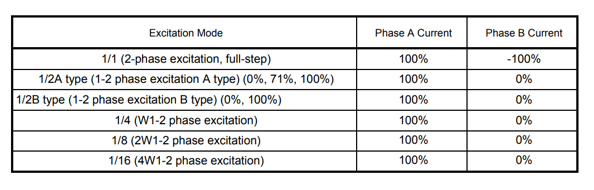
ทิศทางปัจจุบันถูกกำหนดดังนี้
out1a → out2a: ทิศทางไปข้างหน้า
out1b → out2b: ทิศทางไปข้างหน้า
แอปพลิเคชัน TB6600HG
รายการด้านล่างนี้เป็นแอปพลิเคชันบางส่วนของ TB6600HG
•ไฟท้าย
•อาคารต้อนรับ
•จอแสดงผล LED กลางแจ้งขนาดใหญ่
•ทางเลือกสำหรับไฟ HID
•แสงไฟสูงอุตสาหกรรม
•ไฟแบ็คไลท์ LED รูปแบบขนาดใหญ่
•การแสดงแบ็คไลท์ LED
•สมาร์ทโฟนที่เปิดใช้งานกล้อง
•ทอพอโลยีของคนขับแบบก้าวขึ้นหรือก้าวลง
ความผิดพลาดทั่วไปและการแก้ปัญหาของ TB6600HG
รายการต่อไปนี้แสดงความผิดพลาดทั่วไปเกี่ยวกับ TB6600HG และโซลูชันของพวกเขาเพื่อช่วยให้คุณดำเนินการอย่างรวดเร็วเมื่อพบกับความผิดพลาดและปกป้องการทำงานปกติของอุปกรณ์
Failure One: ชิปไดรเวอร์ความร้อนสูงเกินไป
ชิป TB6600HG นั้นร้อนเกินไปอาจเกิดจากภาระมากเกินไปหรือสภาพการกระจายความร้อนที่ไม่ดี
วิธีแก้ปัญหา: เพิ่มการกระจายความร้อน
เราจำเป็นต้องเพิ่มอ่างล้างมือความร้อนหรือพัดลมในชิปและมอเตอร์คนขับเพื่อให้แน่ใจว่าพวกเขาสามารถกระจายความร้อนได้อย่างเต็มที่ในขณะที่ทำงานในเวลาเดียวกันเราจำเป็นต้องรักษาสภาพแวดล้อมรอบ ๆ ชิปคนขับและมอเตอร์ที่มีการระบายอากาศอย่างดีเพื่อหลีกเลี่ยงความร้อนสูงเกินไป
ความล้มเหลวสอง: มอเตอร์หมุนไปในทิศทางที่ผิด
หลังจากมอเตอร์ได้รับสัญญาณไดรฟ์ทิศทางของการหมุนจะไม่สอดคล้องกับที่คาดไว้อาจเป็นสัญญาณควบคุมที่ไม่ถูกต้องหรือชิปไดรฟ์ไม่ได้รับการกำหนดค่าอย่างเหมาะสม
วิธีแก้ปัญหา: ตรวจสอบสัญญาณควบคุม
เราจำเป็นต้องตรวจสอบสัญญาณควบคุมที่ส่งไปยัง TB6600HG อย่างระมัดระวังเพื่อให้แน่ใจว่าสัญญาณควบคุมทิศทางและสัญญาณชีพจรถูกต้องหากใช้ไมโครคอนโทรลเลอร์เพื่อส่งสัญญาณโปรดตรวจสอบรหัสโปรแกรมและการกำหนดค่า PIN
ความล้มเหลวที่สาม: มอเตอร์ล้มเหลวในการหมุน
มอเตอร์ไม่ตอบสนองหลังจากได้รับสัญญาณไดรฟ์อาจเป็นไปได้ว่าชิปไดรเวอร์ไม่ทำงานอย่างถูกต้องหรือมีปัญหากับการเชื่อมต่อระหว่างมอเตอร์และชิปไดรเวอร์
วิธีแก้ปัญหา: ตรวจสอบแหล่งจ่ายไฟและการเชื่อมต่อ
เราต้องตรวจสอบให้แน่ใจว่าแหล่งจ่ายไฟของ TB6600HG เป็นเรื่องปกติและการเชื่อมต่อระหว่างมอเตอร์และชิปไดรเวอร์นั้นเป็นของแข็งเราตรวจสอบแรงดันไฟฟ้าและกระแสในวงจรโดยใช้มัลติมิเตอร์เพื่อให้แน่ใจว่าพวกเขาอยู่ในช่วงปกติ
ความล้มเหลวสี่: ความร้อนมอเตอร์อย่างจริงจัง
มอเตอร์สร้างความร้อนมากเกินไปในระหว่างการทำงานซึ่งอาจเกิดจากการกระจายความร้อนในปัจจุบันหรือไม่ดี
วิธีแก้ปัญหา: ปรับการตั้งค่าปัจจุบัน
หากมอเตอร์สร้างความร้อนอย่างรุนแรงเราสามารถลองลดกระแสเอาต์พุตของชิปไดรเวอร์โดยการปรับพินการตั้งค่าปัจจุบันของ TB6600HG เราสามารถ จำกัด ขนาดของกระแสเอาต์พุตได้อย่างมีประสิทธิภาพซึ่งจะช่วยลดภาระของมอเตอร์และทำให้มั่นใจได้ว่าการทำงานของมอเตอร์นั้นมีเสถียรภาพและปลอดภัย
คำถามที่พบบ่อย [คำถามที่พบบ่อย]
1. ช่วงอุณหภูมิการทำงานของ TB6600HG คืออะไร?
อุณหภูมิการทำงานของ TB6600HG อยู่ในช่วง -30 ° C ถึง 85 ° C
2. TB6600HG คืออะไร?
TB6600HG เป็นตัวขับมอเตอร์แบบสเต็ปเปอร์ออกแบบมาเพื่อควบคุมมอเตอร์สเต็ปในแอพพลิเคชั่นต่าง ๆ เช่นเครื่อง CNC เครื่องพิมพ์ 3 มิติหุ่นยนต์และระบบอัตโนมัติ
3. คุณสมบัติที่สำคัญของ TB6600HG คืออะไร?
คุณสมบัติ TB6600HG รวมถึงกระแสมอเตอร์ที่ปรับได้การตั้งค่าความละเอียดขั้นตอนการป้องกันความร้อนสูงเกินไปในตัวและอินพุตที่แยกออกจากกันสำหรับการควบคุมสัญญาณ
เกี่ยวกับเรา
ALLELCO LIMITED
อ่านเพิ่มเติม
สอบถามรายละเอียดเพิ่มเติมอย่างรวดเร็ว
กรุณาส่งคำถามเราจะตอบกลับทันที

คู่มือการวิเคราะห์และแอปพลิเคชันโดยละเอียดสำหรับ UCC27517DBVR ไดร์เวอร์ด้านล่างประสิทธิภาพสูงประสิทธิภาพสูง
บน 03/09/2024
STM32F030K6T6 คู่มือที่ครอบคลุม: ไมโครคอนโทรลเลอร์แขนประสิทธิภาพสูง M0
บน 03/09/2024
โพสต์ยอดนิยม
-
GND ในวงจรคืออะไร?
บน 01/01/1970 3272
-

คู่มือเชื่อมต่อ RJ-45: รหัสสีตัวเชื่อมต่อ RJ-45, แผนการเดินสาย, แอปพลิเคชัน R-J45, RJ-45 Datasheets
บน 01/01/1970 2815
-
การทำความเข้าใจแรงดันไฟฟ้าของแหล่งจ่ายไฟในอิเล็กทรอนิกส์ VCC, VDD, VEE, VSS และ GND
บน 20/11/0400 2640
-

ประเภทตัวเชื่อมต่อไฟเบอร์: SC vs LC และ LC กับ MTP
บน 01/01/1970 2265
-

การเปรียบเทียบระหว่าง DB9 และ RS232
บน 01/01/1970 1882
-

แบตเตอรี่ LR44 คืออะไร?
กระแสไฟฟ้าที่ใช้กำลังแพร่หลายแทรกซึมทุกแง่มุมของชีวิตประจำวันของเราตั้งแต่อุปกรณ์เล็กน้อยไปจนถึงอุปกรณ์การแพทย์ที่คุกคามชีวิตมันมีบทบาทเงียบอย่างไรก็ตามการเข้าใจพลังงานนี้อย่างแท้จริงโดยเฉพาะอย่างยิ่ง...บน 01/01/1970 1846
-
การทำความเข้าใจพื้นฐาน: การต่อต้านการเหนี่ยวนำและความสามารถพิเศษ
ในการเต้นรำที่ซับซ้อนของวิศวกรรมไฟฟ้าทั้งสามองค์ประกอบพื้นฐานต้องใช้เวทีกลาง: การเหนี่ยวนำความต้านทานและความจุแต่ละหมีมีลักษณะเฉพาะที่กำหนดจังหวะแบบไดนามิกของวงจรอิเล็กทรอนิกส์ที่นี่เราเริ่มต้นการเดินท...บน 01/01/1970 1807
-
RF คืออะไรและทำไมเราถึงใช้มัน?
เทคโนโลยีความถี่วิทยุ (RF) เป็นส่วนสำคัญของการสื่อสารไร้สายที่ทันสมัยทำให้สามารถส่งข้อมูลในระยะทางไกลได้โดยไม่ต้องเชื่อมต่อทางกายภาพบทความนี้นำเสนอพื้นฐานของ RF อธิบายว่ารังสีแม่เหล็กไฟฟ้า (EMR) ทำให้การสื่อส...บน 01/01/1970 1801
-

คู่มือการใช้แบตเตอรี่ CR2430: ข้อมูลจำเพาะแอปพลิเคชันและการเปรียบเทียบกับแบตเตอรี่ CR2032
แบตเตอรี่ CR2430 คืออะไร?ประโยชน์ของแบตเตอรี่ CR2430บรรทัดฐานแอปพลิเคชันแบตเตอรี่ CR2430CR2430 เทียบเท่าCR2430 เทียบกับ CR2032ขนาดแบตเตอรี่ CR2430สิ่งที่จะมองหาเมื่อซื้อ CR2430 และเทียบเท่าแผ่นข้อมูล PDFคำถามที่พบบ่อย แบตเตอรี่เป็นห...บน 01/01/1970 1799
-
คู่มือที่ครอบคลุมถึง HFE ในทรานซิสเตอร์
ทรานซิสเตอร์เป็นส่วนประกอบสำคัญในอุปกรณ์อิเล็กทรอนิกส์ที่ทันสมัยช่วยให้การขยายสัญญาณและการควบคุมบทความนี้นำเสนอความรู้เกี่ยวกับ HFE รวมถึงวิธีการเลือกค่า HFE ของทรานซิสเตอร์วิธีการค้นหา HFE และการได้รับทรานซ...บน 20/11/5600 1782
หมายเลขชิ้นส่วนร้อน
-

IS43TR85120AL-125KBLI
ISSI, Integrated Silicon Solution Inc
IC DRAM 4GBIT PARALLEL 78TWBGA
GCM1555C1H7R0DA16J
Murata Electronics
CAP CER 7PF 50V C0G/NP0 0402
BZG04-20TR
Vishay General Semiconductor - Diodes Division
TVS DIODE 20VWM 33.8VC DO214AC
ACPL-P314-560E
Broadcom Limited
OPTOISO 3.75KV 1CH GATE DRVR 6SO
EP4CE22E22I7N
Intel
IC FPGA 79 I/O 144EQFP
GRM31CR72A104KW03L
Murata Electronics
CAP CER 0.1UF 100V X7R 1206
AT87F51-24AC
Microchip Technology
IC MCU 8BIT 4KB FLASH 44TQFP
30WQ03FN
SMC Diode Solutions
DIODE SCHOTTKY 30V DPAK
SI1926DL-T1-GE3
Vishay Siliconix
MOSFET 2N-CH 60V 0.37A SOT363
NCP153MX330180TCG
onsemi
IC REG LIN 1.8V/3.3V 130MA 6XDFN
FQPF12P10
onsemi
MOSFET P-CH 100V 8.2A TO220F
GRM1885C1H6R8CZ01D
Murata Electronics
CAP CER 6.8PF 50V C0G/NP0 0603
1812WC152KAT1A
KYOCERA AVX
CAP CER 1500PF 2.5KV X7R 1812
25LC256-I/P
Microchip Technology
IC EEPROM 256KBIT SPI 10MHZ 8DIP
2N685A
Solid State Inc.
TO 48 25 AMP SCR
AMPAL20L10BJC
Vantis
PLD
SN74ABT843DWR
Texas Instruments
IC 9BIT BUS-INTFC D 3ST 24-SOIC
BC846BDW1T1G
onsemi
TRANS 2NPN 65V 0.1A SC88/SC70-6 -

BR93L86RFVM-WTR
Rohm Semiconductor
IC EEPROM 16KBIT SPI 2MHZ 8MSOP
06035A102JAJ2A
KYOCERA AVX
CAP CER 1000PF 50V NP0 0603
IRL3803STRR
Infineon Technologies
MOSFET N-CH 30V 140A D2PAK
ICL3222CP
Intersil
IC TRANSCEIVER FULL 2/2 18DIP
MC33560DWR2G
onsemi
IC INTERFACE SPECIALIZED 24SOIC
XCZU6CG-2FFVC900I
AMD
IC SOC CORTEX-A53 900FCBGA
5SGXMA3K2F40I2N
Altera (Intel® Programmable Solutions Group)
IC FPGA 696 I/O 1517FBGA
ISL6232CAZA
Renesas Electronics America Inc
IC PWR SUPPLY CONTROLLER 28QSOP
STW240N10F7
STMicroelectronics
MOSFET N-CH 100V 180A TO247
XC7VX415T-1FFG1157C
AMD
IC FPGA 600 I/O 1157FCBGA
SI32282-A-FM
Skyworks Solutions Inc.
IC TELECOM INTERFACE 56QFN
CD214B-F2600
Bourns Inc.
DIODE GEN PURP 600V 2A DO214AA
NJM082M
Nisshinbo Micro Devices Inc.
IC OPAMP JFET 2 CIRCUIT 8DMP
AD5272BRMZ-50
Analog Devices Inc.
IC DGT POT 50KOHM 1024TAP 10MSOP
NJM79M09FA
Nisshinbo Micro Devices Inc.
IC REG LINEAR -9V 500MA TO220F
Z1SMA24
Diotec Semiconductor
ZENERDIODE,SMA,24V,1W,5%
KSZ9896CTXC-TR
Microchip Technology
IC ETHERNET SWITCH 6PORT 128TQFP
GRM0335C2A4R5CA01J
Murata Electronics
CAP CER 4.5PF 100V C0G/NP0 0201 -

FMMT5179TA
Diodes Incorporated
RF TRANS NPN 12V 2GHZ SOT23-3
TK8P65W,RQ
Toshiba Semiconductor and Storage
PB-F POWER MOSFET TRANSISTOR DPA
ZUW250512
Cosel USA, Inc.
DC DC CONVERTER +/-12V
IRG4PH50SPBF
Infineon Technologies
IGBT 1200V 57A 200W TO247AC
MT29F4G08ABBDAH4-AITX:D
Micron Technology Inc.
IC FLASH 4GBIT PARALLEL 63VFBGA
C3216X7T2E224K160AA
TDK Corporation
CAP CER 0.22UF 250V X7T 1206
BU1851GUW-E2
Rohm Semiconductor
IC ENCODER 1 X 8:8 VBGA035W040
MK22FN512CAP12R
NXP USA Inc.
IC MCU 32BIT 512KB FLASH 80WLCSP
7443633300
Würth Elektronik
FIXED IND 33UH 12A 11.4 MOHM SMD
MIC4423YWM
Microchip Technology
IC GATE DRVR LOW-SIDE 16SOIC
LB1846MC-AH
onsemi
IC HALF BRIDGE DRV 800MA 10MFPSK
MHQ1005P1N7BT000
TDK Corporation
FIXED IND 1.7NH 1A 40 MOHM SMD
BAW156
Diodes Incorporated
DIODE ARRAY GP 85V 140MA SOT23-3
UA7810CKTTR
Texas Instruments
IC REG LIN 10V 1.5A DDPAK/TO263
AD7893AN-2
Analog Devices Inc.
IC ADC 12BIT SAR 8DIP
S29PL032J70BAI120
Infineon Technologies
IC FLASH 32MBIT PARALLEL 48FBGA
S01-806005KIT
Harwin Inc.
RFI SHIELD CAN KIT
08055C154JAT2A
AVX Corporation
CAP CER 0.15UF 50V X7R 0805